谐波齿轮传动原理是工程师А.И.Москвитин首先与1947年提出,美国工程师C.W.Musser于1955年发明创造的。
通过利用柔性工作构件的弹性变形进行运动或动力传递的一种新型传动方式,颠覆了机械传动采用刚性构件的模式,从而获得了一系列其它传动所难以达到的特殊功能,由于中间柔性构件的变形过程基本上是一个余弦的对称谐波,因此而得名。
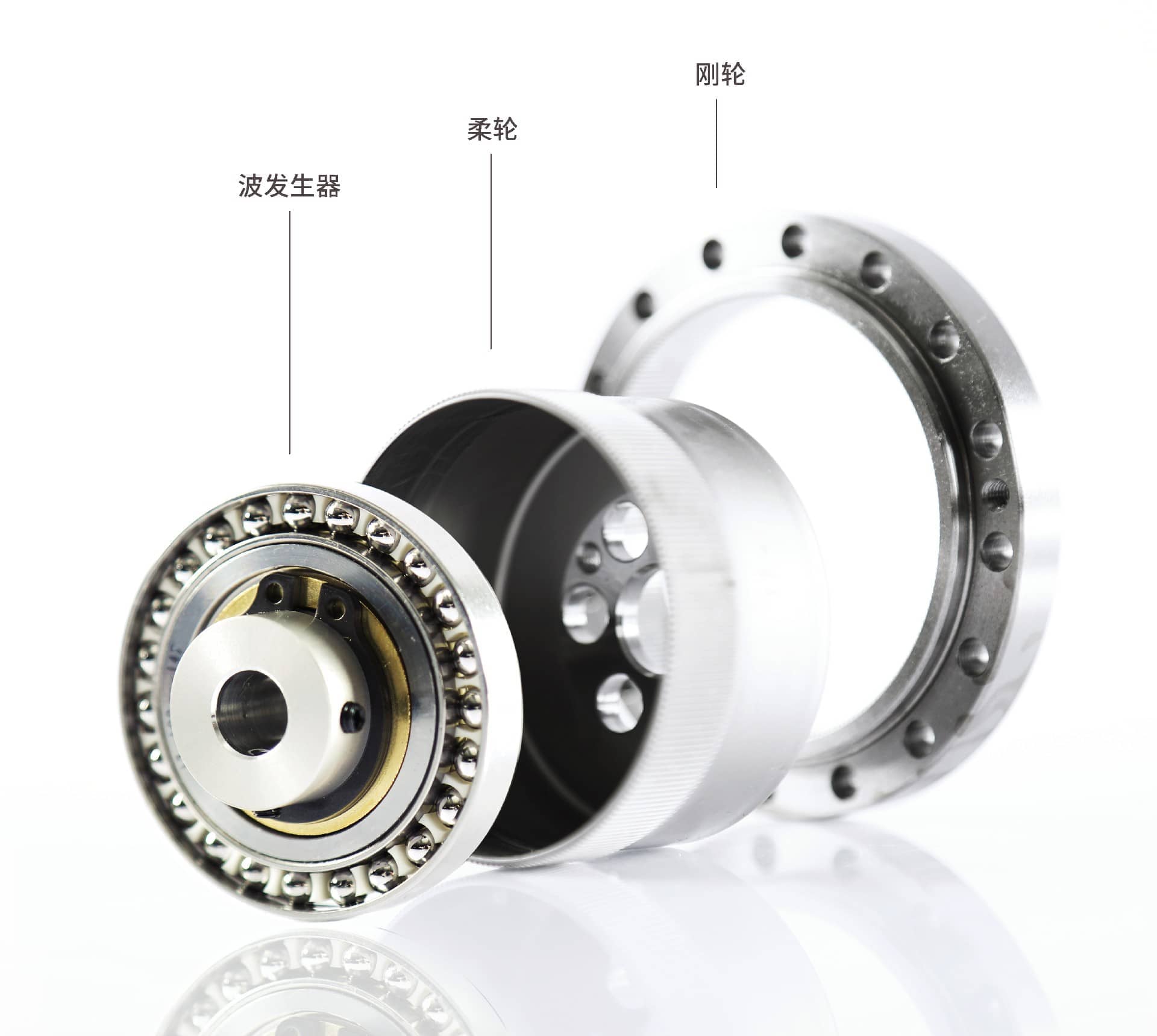
刚轮:刚性环状部件,内周刻有齿轮,比柔轮齿数多出2齿,一般固定在机壳上。
柔轮:薄壁杯型金属弹性体部件,开口部外周刻有齿轮,柔轮底部被称为膜片部,通常被安装在输出轴上。
波发生器:在椭圆状凸轮的外周组装薄壁滚珠轴承的部件,轴承的内轮固定在凸轮上,外轮可通过滚珠实施弹性变形,通常被安装在输入轴上。
谐波齿轮传动减速原理是利用柔轮、刚轮和波发生器的相对运动,主要是柔轮的可控 弹性变形来实现运动和动力传递的。波发生器内的椭圆形凸轮在柔轮内旋转使柔轮产生变形,在波发生器的椭圆形长轴两端处的柔轮轮齿和刚轮轮齿进入啮合时,短轴两端处的柔轮轮齿与刚轮轮齿脱开。对于波发生器长轴和短轴之间的齿,沿柔轮和刚轮周长的不同区段内处于逐渐进入啮合的半啮合啮合的半啮合状态,称为啮入。处于逐渐退出状态,称为啮出。当波发生器的连续转动时,柔轮不断产生形变,使两轮轮齿在啮入、啮合、啮出和脱开四种运动不断改变各自原来的工作状态,产生错齿运动,实现了主动波发生器到柔轮的运动传递。
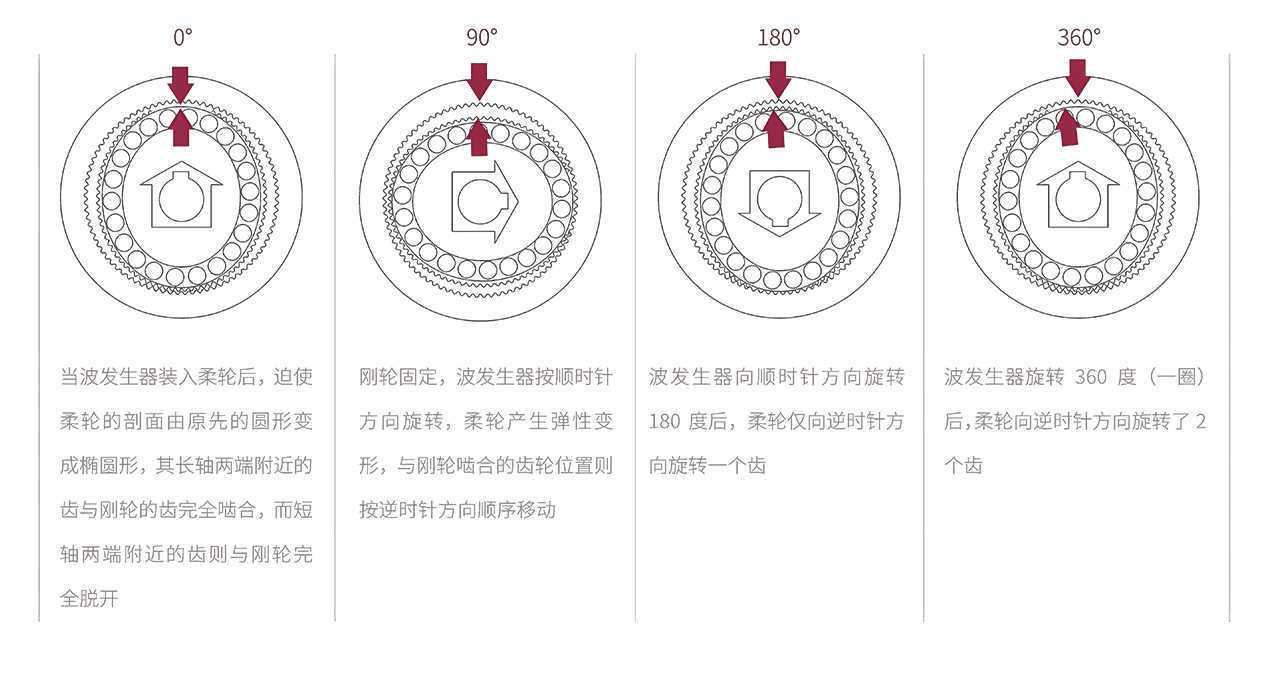
0°:当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开;
90°:刚轮固定,波发生器按顺时针方向旋转,柔轮产生弹性变形,与刚轮啮合的齿轮位置则按逆时针方向顺序移动
180°:波发生器向顺时针方向旋转180度后,柔轮仅向逆时针方向旋转一个齿
360°:波发生器旋转360度(一圈)后,柔轮向逆时针方向旋转了2个齿